



J-ISPIN is sponsoring the 14th International Conference on Indoor Positioning and Indoor Navigation (IPIN 2024) with six best paper awards and the Journal-to-Conference Track

August 21, 2024

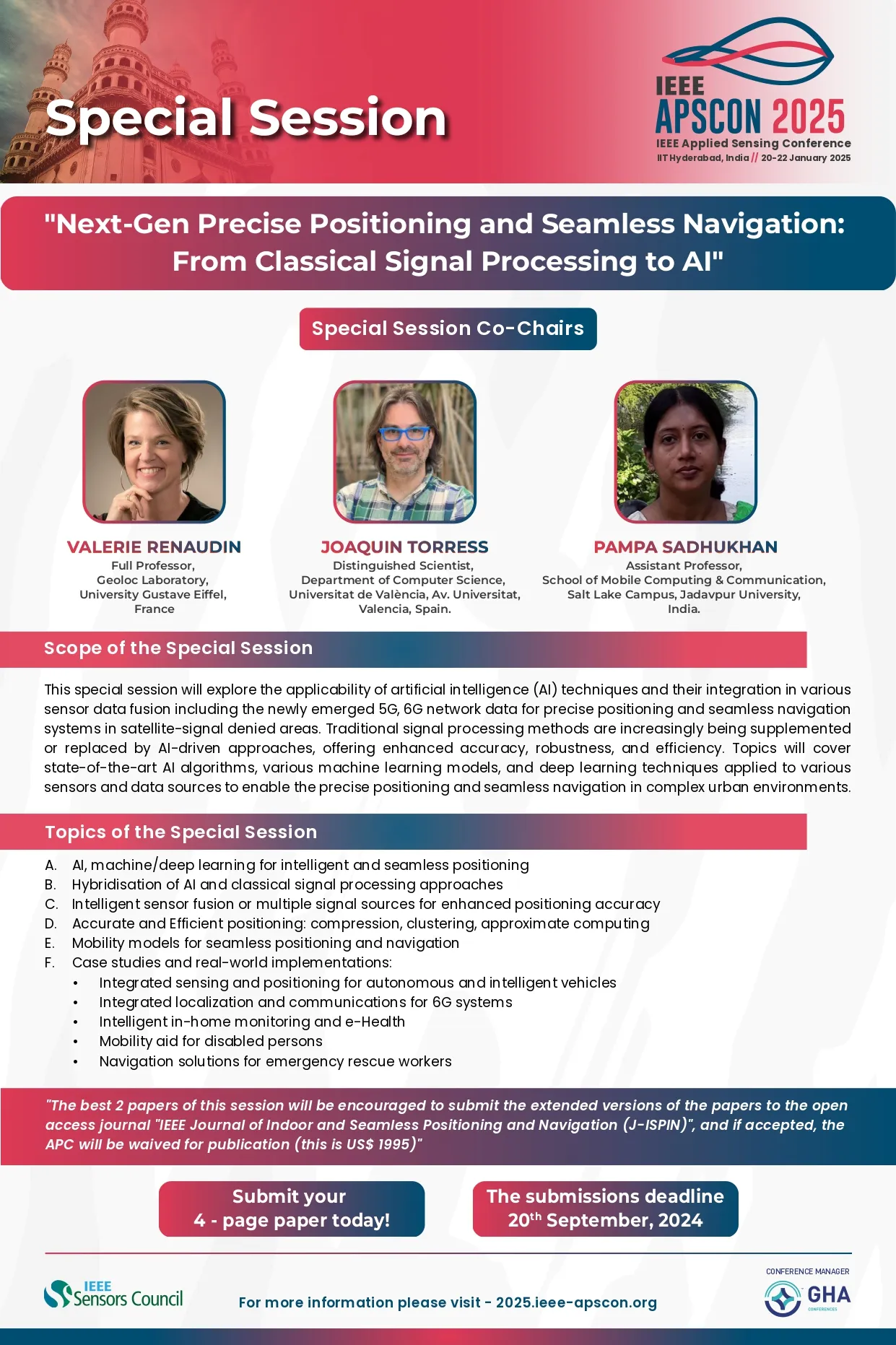



Univ. Gustave Eiffel
Bouguenais, France




University of Valencia
Valencia, Spain

Huawei, UK

Google, USA

ISTI-CNR
Pisa, Italy

ISTI-CNR
Pisa, Italy

University of Connecticut
United States

University of Haifa
Israel

Tampere University
Tampere, Finland

Sapienza Università di Roma
Roma, Italy

University of Calgary
Calgary, AB, Canada
Shanghai Jiao Tong University
Shanghai, China
ISTI-CNR
Pisa, Italy

Dhirubhai Ambani Institute of Information and Communication Technology, India

United Arab Emirates University

Ecole Centrale Nantes, France

Linköping University
Linköping, Sweden

Hokkaido University
Sapporo, Japan

University of Alcalá
Madrid, Spain

Tampere University, Finland

AIR Chinese Academy of Sciences (CAS)
Beijing, China

Shenzhen University
Shenzhen, China

